I covered the "door no working" topic in this blog post last year. Those of us who advise/mentor know what to check for. The first thing is to make sure that they uploaded a physics shape. "Have you switched the physics shape to Prim?", they will typically do this and mostly it fixes things, but then there is still a reasonably significant proportion who return to say "I've done that and it's still not working."
The next step, typically, is to ask what the dimensions of the mesh are. Quite often the poor beleaguered builder will look quizzically at you, conclude you are mad and perhaps go off on some crackpot detour led astray by another helpful but ill-informed soul, they will often end up dropping into physics view and concluding that they are right and that the blocked door is a bug. They are half right, there is a bug, but it is not in the "blocked door".
Who debugs the debugger?
 |
| How to find physics view in Firestorm (shoudl work on most viewers) |
When we are looking for issues with physics that go beyond the basic checks it is often the case that those who are at least aware of the advanced menus will take a look at the Render Metadata menu, and the Physics shapes view in particular.
Physics shape view is a special display that encodes a lot of information about the physics in the scene. You can use this to examine the physical representation of the region and in particular of the object that you are interested in.However, herein lies the issue. There is a bug, it has been around for a number of years and many of us have raised Jira bug reports against it in the past. With my more recent switch to become a developer on the Firestorm viewer, I was able to spend some time to work out why there was a bug here and what the underlying issue was. You can read the Jira BUG report I raised for the technical background.
The case of the invisible wall
A typical example, perhaps the most typical example, is a creator who has uploaded a mesh wall with a door in it. The creator sets a custom physics shape in the uploader and remembers to set the phsyics type to "Prim" yet still the doorway refuses to let her pass. She concludes that she must have uploaded it badly and looks at the physics representation using physics shape view.
This is what she sees.

"What the heck? The physics shape looks perfect why won't it let me through?"
The problem is that the viewer is lying to us. What it thinks the physics should look like is not in agreement with what the server is enforcing.
So what is going on and why is the viewer lying?
Size Matters (sometimes)
If you've read my previous blogs you'll know that there are two distinct ways of representing a physics shape (or physics volume to use a more correct term), hulls and triangles. The key difference is that a triangular physics shape (mesh) changes its value based upon the scale, and to make matters more confusing, it changes inversely with the object scale. this is counter intuitive to the uninformed.
Why does physics cost grow as the objects get smaller?
When you upload a mesh you can define the physics shape that will be applied to the object.The default gives you no user defined physics at all, in this situation all that the object has when rezzed in world is the "convex hull" and "none" option. We are not going to concern ourselves with this today.
If you look at the physics tab of the upload dialogue you find a selector that allows you to choose a mesh model to be used for your physics.
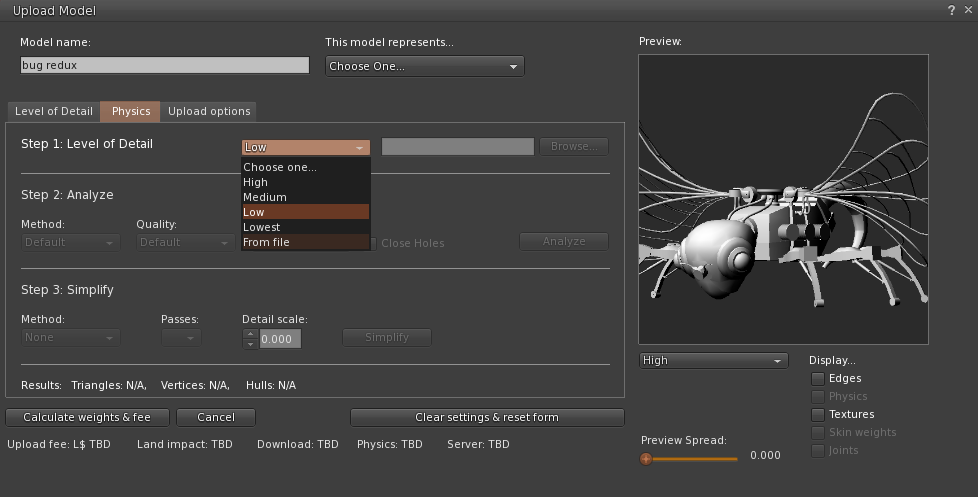
This is a very important step and often overlooked by Mesh creators.
The Mesh I am using in the example here is one of my bugs from this year's Fantasy Faire. It has around 20000 triangles in the form shown (High LOD) and was designed to be very large (40m wingspan). It would undoubtedly be an awful choice for the physics shape. One of the basic rules of physics uploads is to keep things very simple, the reason is plain; if you want to reduce the lag on the sim and in your client then minimising the work that has to be down to determine when someone has collided with your object is essential.
If I were to use the High LOD model as my physics shape then every one of those 20000+ triangles is potentially intersecting with a part of the other object. Special optimisations segment the space between objects to reduce the number of checks that need to be made but in the end, it resolves down to individual triangles. the smaller the triangles the more work has to be done to determine which, if any, it will intersect with and the higher the overhead on collision detection.
In the following animation ask yourself "Which of the triangles is the ball touching?"
In order to encourage well-constructed Mesh assets, the Second Life land impact algorithm includes a physics weight component. The algorithm itself is not fully public and the documentation incomplete and inaccurate but the principle is clear. The more "skinny" triangles in the object the more your physics cost will penalise you.
The obvious side-effect here is that as you make an object thinner in one dimension the triangles will become thinner and as such will increase the physics cost. The smaller it gets the higher the physics cost. In theory, as width tends to zero the physics cost tends to infinity. This is where Second Life steps in and takes control. In order to prevent the physics cost from going asymptotic Second Life has code that forces an object to have the physics of a simple box once its dimensions go below a certain limit and as many of you will have known from the outset, that is exactly what was affecting our little mesh door. The rule that the viewer enforces is as follows:-
IF object has more than 2 dimensions less than 0.2m
THEN force the shape to a convex box.
"Wait a minute, that's not right" I hear you cry, and yes you are right, our wall was more than 0.2m in all three dimensions. That's because the viewer does not actually enforce the phsyics. The server does and physics view, simply draws what the viewer "thinks" the phsyics is. But it is wrong.
The rule that the server enforces is different.
IF object is a prim AND has more than 2 dimensions less than 0.2m
THEN force the shape to a convex box.
ELSIF object is a mesh AND has one dimension less than 0.5m
THEN force the shape to a convex box
so here is our answer, the server is far less tolerant of thin meshes than the viewer thinks causing the viewer to display the normal mesh shape when the server has already given up.
The Mesh I am using in the example here is one of my bugs from this year's Fantasy Faire. It has around 20000 triangles in the form shown (High LOD) and was designed to be very large (40m wingspan). It would undoubtedly be an awful choice for the physics shape. One of the basic rules of physics uploads is to keep things very simple, the reason is plain; if you want to reduce the lag on the sim and in your client then minimising the work that has to be down to determine when someone has collided with your object is essential.
So how does a collision get detected?
Whenever another object comes within the radius of my object then SL has to decide whether a collision has occurred, this also applies for rezzing and sitting on objects.If I were to use the High LOD model as my physics shape then every one of those 20000+ triangles is potentially intersecting with a part of the other object. Special optimisations segment the space between objects to reduce the number of checks that need to be made but in the end, it resolves down to individual triangles. the smaller the triangles the more work has to be done to determine which, if any, it will intersect with and the higher the overhead on collision detection.
In the following animation ask yourself "Which of the triangles is the ball touching?"
 |
| Which Triangles is the ball touching? |
In order to encourage well-constructed Mesh assets, the Second Life land impact algorithm includes a physics weight component. The algorithm itself is not fully public and the documentation incomplete and inaccurate but the principle is clear. The more "skinny" triangles in the object the more your physics cost will penalise you.
The obvious side-effect here is that as you make an object thinner in one dimension the triangles will become thinner and as such will increase the physics cost. The smaller it gets the higher the physics cost. In theory, as width tends to zero the physics cost tends to infinity. This is where Second Life steps in and takes control. In order to prevent the physics cost from going asymptotic Second Life has code that forces an object to have the physics of a simple box once its dimensions go below a certain limit and as many of you will have known from the outset, that is exactly what was affecting our little mesh door. The rule that the viewer enforces is as follows:-
IF object has more than 2 dimensions less than 0.2m
THEN force the shape to a convex box.
"Wait a minute, that's not right" I hear you cry, and yes you are right, our wall was more than 0.2m in all three dimensions. That's because the viewer does not actually enforce the phsyics. The server does and physics view, simply draws what the viewer "thinks" the phsyics is. But it is wrong.
The rule that the server enforces is different.
IF object is a prim AND has more than 2 dimensions less than 0.2m
THEN force the shape to a convex box.
ELSIF object is a mesh AND has one dimension less than 0.5m
THEN force the shape to a convex box
so here is our answer, the server is far less tolerant of thin meshes than the viewer thinks causing the viewer to display the normal mesh shape when the server has already given up.
Making things right, or "you cannae change the laws of physics, captain"
The big question though is, which one is more correct?
The simple answer is the server rules are right because those are the ones that are enforced, but the 0.5m limit on walls is a pain in the rear, nobody wants thick walls and while analysed mesh is a solution, very few know about this and the second life wiki still recommends non-analysed!
For this reason, I have been lobbying for solution 2 on my Jira to be considered. Fingers crossed we may get the ability to make thinner Mesh walls.
In the meantime, I have updated Firestorm to correctly reflect the enforced laws of physics. This should greatly improve the use of the physics view as a debugging tool.
The following video shows the new changes in operation and now a blocked door looks blocked until the dimensions change. It should be in the next release of Firestorm.
Another overly long and exhaustively explanatory blog. I hope it explained a few aspects of physics and one of the (soon to be ex) annoyances.
Love
Beq
x
No comments:
Post a Comment